
问题描述
Windows10安装的是最新版Microsoft Edge浏览器,但是老是报错:“内存不足,无法打开此页面 请尝试关闭其他标签页或程序以释放内存。错误代码: Out of Memory”
问题分析
我电脑是Windows10 2019 LTSC版本,32G内存,但是之前设置虚拟内存是800M,但是最近更新了EDGE后出现了这个问题,只要虚拟内存由系统自己设置即可。
问题描述
Windows10安装的是最新版Microsoft Edge浏览器,但是老是报错:“内存不足,无法打开此页面 请尝试关闭其他标签页或程序以释放内存。错误代码: Out of Memory”
问题分析
我电脑是Windows10 2019 LTSC版本,32G内存,但是之前设置虚拟内存是800M,但是最近更新了EDGE后出现了这个问题,只要虚拟内存由系统自己设置即可。
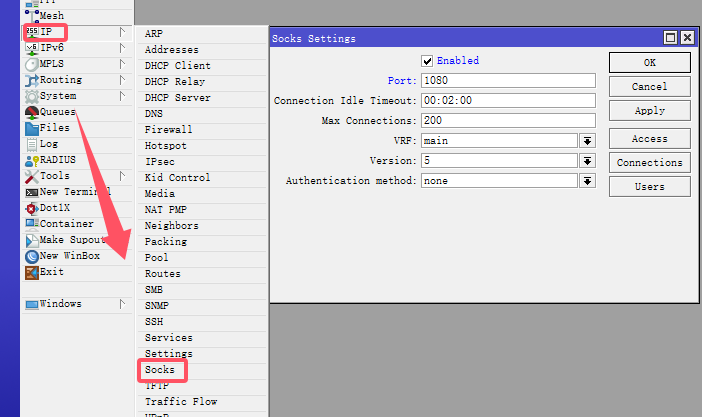
RouterOS从6.47开始又支持SOCK代理服务器了,支持SOCKv4和SOCKv5,只要简单的配置就可以启动。
配置方法
以下教程以RouterOS x86 v7.15.2为例
1、IP --> SOCKS,打开Socks Settings设置框,勾选Enabed,Port端口默认为1080,Version是版本(sockv4和sockv5),Authentication medthod是加密方式(none和password),点击 OK
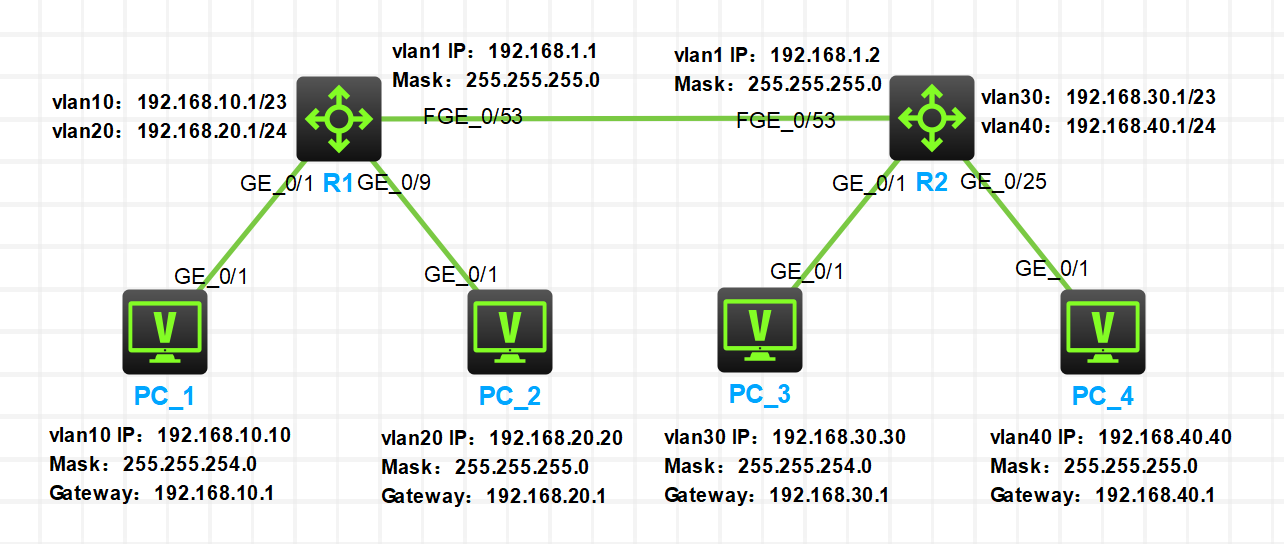
开放式最短路径优先(Open Shortest Path First,OSPF)是广泛使用的一种动态路由协议,它属于链路状态路由协议,具有路由变化收敛速度快、无路由环路、支持变长子网掩码(VLSM)和汇总、层次区域划分等优点。
本文主要讲三层交换机配置OSPF动态路由
1、环境介绍
1.1 网络拓扑图
1.2 设备IP信息

问题描述
使用Ventoy制作的U盘启动盘启动(UEFI)的时候直接出现报错并关机,报错提示如下:
Verifying shim SBAT data failed: Security Policy Violation
Something has gone seriously wrong: SBAT self-check failed:Security Policy Violation
问题分析
这个报错的主要原因是由于微软2024年08月11日推送的更新KB5041580,该更新中的SBAT技术会影响通过EFI引导启动的Linux系统。
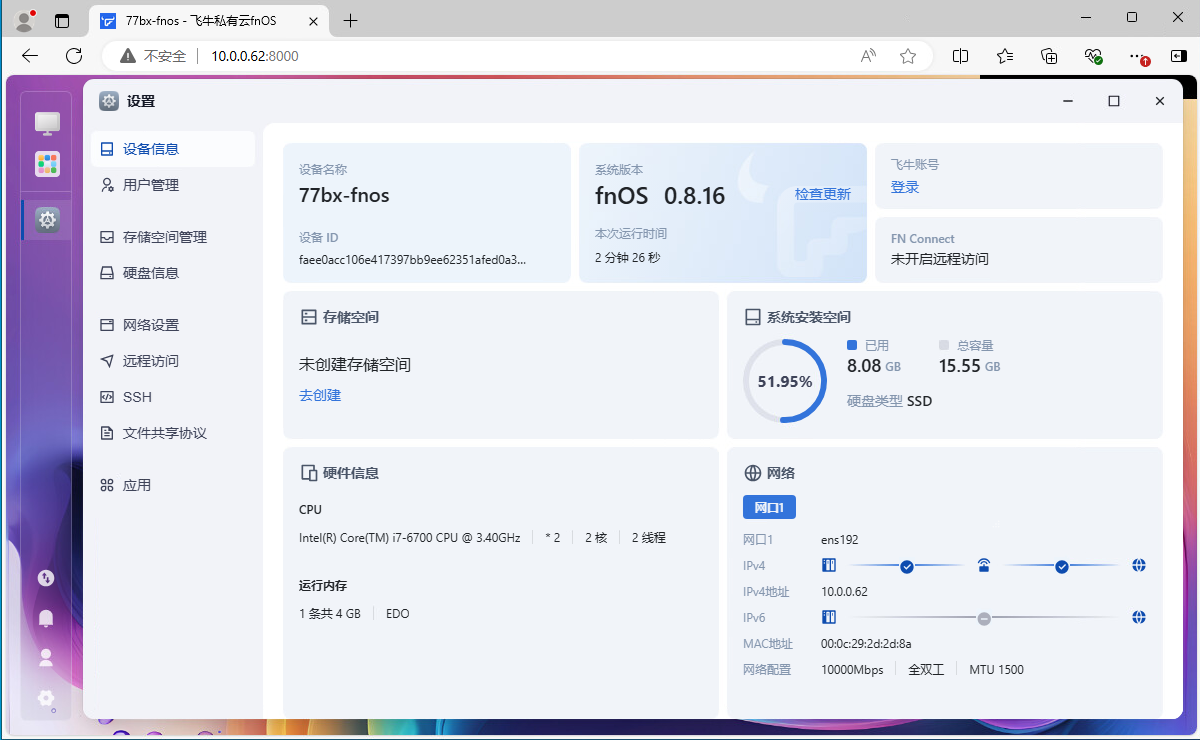
私有云系统fnOS进行了公测,该系统支持个人用户免费使用。fnOS是基于Debian发行版开发的,兼容主流x86硬件,可以很容易的安装。
1、环境介绍
1.1 VMware ESXi 7.0U3
1.2 fnOS安装包fnos-0.8.16-331.iso(下载地址:https://www.fnnas.com/download)
2、虚拟机创建
宝塔面板BT目前计划任务已经集成了Redis的备份功能,但是还原功能只能手动恢复。
操作方法
1、配置AOF持久化(appendonly:no)关闭,然后关闭redis服务。
注意:如果appendonly设置成yes时候可能不会将dump.rdb文件中的数据恢复。
2、把宝塔备份文件(类似于0_2024-09-01_01-30-03_redis_data.rdb)重命名为dump.rdb,然后替换掉/www/server/redis目录下的dump.rdb。
1个PHP项目中,需要在一个大数组中遍历查询是否存在该元素,使用了in_array()导致运行程序时快时慢。通过测试得知in_array()和array_search()在大数组查询越靠后的元素时速度越慢。而使用array_key_exists()或者isset()则会很快。因为这个函数需要用到key,所以使用array_flip()反转/交换数组中所有的键名以及它们关联的键值。
1、测试环境
PHP 8.3.7和阿里云99元云主机。
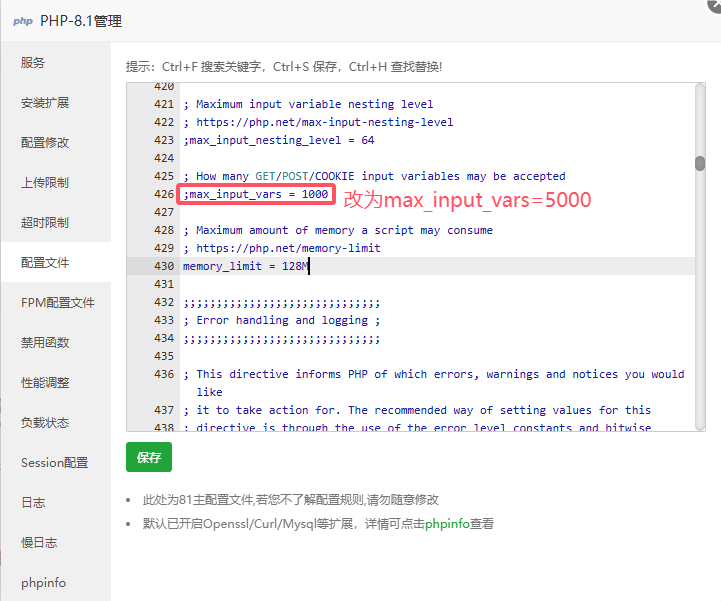
问题描述
PHP8.1使用POST提交了1600个参数,最终$_POST只能获取到1000个参数,其他的参数会丢弃。
问题分析
PHP有2个参数会导致这个问题:post_max_size和max_input_vars。本案例是因为max_input_vars默认1000导致的。
解决方法
将PHP配置文件中的max_input_var调大,该值默认为1000(分号注释掉了),去除分号注释,并把该值改为5000并重启PHP即可。
PHP从二维数组中根据权重随机取出一个元素,权重越高取出的概率越高,抽奖的简单算法。
二维数组数据如下,weight代表权重大小
$data = [ ['id'=>1,'name'=>'特等奖','weight'=>1], ['id'=>2,'name'=>'一等奖','weight'=>3], ['id'=>3,'name'=>'二等奖','weight'=>5], ['id'=>4,'name'=>'三等奖','weight'=>10], ['id'=>5,'name'=>'四等奖','weight'=>20], ['id'=>6,'name'=>'五等奖','weight'=>30], ['id'=>7,'name'=>'谢谢抽奖','weight'=>100] ];
方法一:按照权重生成一个数组,数组随机取值即可。
问题描述
Debian在运行shell脚本的时候报错,报错提示-bash: ./xx.sh: cannot execute: required file not found
问题分析
这个问题是shell脚本文件格式的问题,在Windows下为Dos格式,在Debian(Linux)下需要使用unix格式。
解决方法


后来解决了,问了chatgpt,说policy应该有个不是template的自动生成的动态选项。然后重新新建了一次,就行了。不过还是不明白最开始为什么不行。笔记 <https://xyh.moe/index.php/archives/284/>
仙玉衡 评论于05-17
是不是没用对软件。
星之宇 评论于05-15
大佬,安装包文件vcsa-ui-installer\\win32\\resources\\app\\dist\\resources\\layout.json不能修改怎么办
sagdyuhsg 评论于05-15连上了的话,可以看看路由,可能是没有静态路由导致无法上网的。
星之宇 评论于05-11连是连上了,但是网不通,能指导下么?
仙玉衡 评论于05-09nat设置没有做好,可能要修改你端口映射的规则
星之宇 评论于02-13